Nuvens de pontos são conjuntos de dados de vértices em um sistema de coordenadas tridimensional, geralmente definido por coordenadas X, Y e Z. O método mais comum para a obtenção de dados de nuvem de pontos é o uso de scanners a laser 3D ou técnicas de processamento de imagem fotogramétrica em software.
Os scanners 3D usam a tecnologia LiDAR, uma tecnologia de sensoriamento remoto que usa pulsos de laser para coletar dados. O sistema LiDAR calcula quanto tempo leva para a onda de luz laser atingir o alvo e retornar ao scanner usando a velocidade da luz, que é de 299 792 458 m/s.
Os princípios de medição usados em scanners 3D são métodos de medição de distância pulsada e de fase, bem como um método de varredura angular direta (método de triangulação).
A tecnologia de digitalização a laser 3D é o método mais comum para obter nuvens de pontos.
Existem vários formatos de arquivo para armazenar dados de nuvem de pontos, que, além de coordenadas 3D, podem transportar informações adicionais – metadados (atributos). Alguns metadados são o resultado da operação do scanner (cor de varredura, intensidade, número de eco, ângulo de varredura, fim de feixe, borda da linha de voo, ID de origem, tempo) e alguns são adicionados a coordenadas 3D ao trabalhar com a nuvem (classe, normal, desvios, geometria).
Inicialmente, os dados lidar são recebidos exclusivamente em formato ASCII. Com o acúmulo de grandes quantidades de dados lidar, um formato binário chamado LAS começou a ser usado para o trabalho e se tornou o formato padrão para organizar e distribuir dados a laser. Dados Lidar em formato LAS são bastante comuns hoje em dia. LAS é o formato mais adequado porque os arquivos neste formato contêm mais informações e, sendo binários, podem ser lidos com mais eficiência quando importados.
LAS é um padrão da indústria desenvolvido e usado pela Sociedade Americana de Fotogrametria e Sensoriamento Remoto (ASPRS). LAS é um formato de arquivo padrão para troca de dados lidar. Ele armazena informações específicas relacionadas aos dados lidar. É uma forma de trocar dados por fornecedores e consumidores e armazenar todas as informações específicas a esses dados.
Cada arquivo LAS contém metadados lidar em um bloco de cabeçalho, seguido por uma entrada individual para cada pulso de laser. A parte de cabeçalho de cada arquivo LAS contém informações de atributos sobre o levantamento lidar: extensões de dados, data de voo, número de pontos registrados, número de pontos de eco, quaisquer dados adicionais e fatores de escala aplicados. Os seguintes atributos de dados de ponto lidar são armazenados no arquivo LAS para cada pulso de laser: X, Y, coordenadas Z, tempo de GPS, intensidade, número de eco, contagem de eco, valores de classificação de ponto, ângulo de varredura, valores RGB adicionais, direção de varredura, borda da linha de voo, dados do usuário, ID da fonte de ponto, informações de onda. O arquivo LAS processado pode incluir pontos classificados como Terreno Baixa Vegetação Alta Vegetação Edifício, e assim por diante.
Códigos de classificação para as versões LAS 1.1 – 1.4 atribuídos pela ASPRS
| Valor de classificação | Significado |
| 0 | Nunca classificado |
| 1 | Não atribuído |
| 2 | Terreno |
| 3 | Baixa Vegetação |
| 4 | Vegetação Média |
| 5 | Alta Vegetação |
| 6 | Edifício |
| 7 | Ponto Baixo |
| 8 | Reservado* |
| 9 | Água |
| 10 | Ferroviário |
| 11 | Superfície da estrada |
| 12 | Reservado* |
| 13 | Fio – Guard (Shield) |
| 14 | Fio – Condutor (Fase) |
| 15 | Torre de Transmissão |
| 16 | Conector de Estrutura de Fio (Insulador) |
| 17 | Ponte Deck |
| 18 | Ruído Alto |
| 19-63 | Reservado |
LAZ – LASzip- LAS arquivo de formato compactado sem perda de dados.
Formato de Terrasólido empresa.
A estrutura do arquivo é a seguinte:
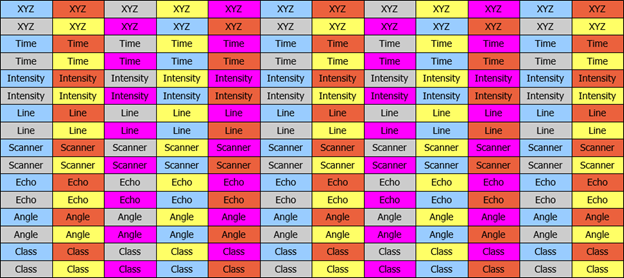
Os atributos da nuvem de pontos são armazenados em blocos: primeiro um bloco de coordenadas de pontos, depois um bloco de tempo, depois um bloco de intensidade, etc.
As vantagens do armazenamento em bloco:
é Possibilidade de ler apenas os atributos necessários de pontos, isso economiza RAM e reduz o tempo para ler um arquivo;
é Você pode salvar apenas os atributos necessários;
é Os selos de tempo agora são armazenados em Tempo Padrão GPS formato.
Formato de Leica empresa Ciclone programa.
Um arquivo de texto simples para armazenar dados de nuvem de pontos. Consiste em uma série de linhas de cabeçalho seguidas por linhas consistindo de vértices (X, Y, Z), coordenadas escalares e valores de cor R, G, B, cada um variando de 0 a 255 (às vezes flutuando).
O cabeçalho Leica parece o seguinte.
número de colunas
número de linhas
st1 st2 st3 ; posição registrada do scanner
sx1 sx2 sx3 ; eixo registrado do scanner ‘X’
sy1 sy2 sy3 ; eixo registrado do scanner ‘Y’
sz1 sz2 sz3 ; scanner registrado eixo ‘Z’
r11 r12 r13 0 ; matriz de transformação
r21 r22 r23 0 ; esta é uma matriz simples de rotação e tradução 4×4
r31 r32 r33 0 ; basta aplicar a cada ponto para obter a coordenada transformada
tr1 tr2 tr3 1 ; utilizar variáveis de dupla precisão
Todas as nuvens de pontos no formato PTX geralmente têm informações de brilho, portanto, cada nuvem terá esse atributo. Os dados de cores são determinados se houver sete elementos na linha de pontos.
As coordenadas dos pontos de nuvem são calculadas usando a posição registrada pelo scanner, bem como a posição do scanner e a matriz de transformação.
Se a posição do scanner for especificada na interface do usuário, a matriz de transformação no cabeçalho PTX ainda será usada para calcular as coordenadas dos pontos.
O formato de arquivo mais comum para armazenar e trocar dados de digitalização a laser 3D.
Em geral, um arquivo E57 consiste em um cabeçalho de 48 bytes, uma série de blocos de dados e uma seção XML. O arquivo inteiro, incluindo o cabeçalho, é dividido em “páginas”, dados de 1024 bytes e 4 bytes no final como uma soma de verificação. Essa natureza de pedaço se aplica até mesmo à seção XML text /readable depois de todos os pedaços de dados.
Exemplo:
struct E57FileHeader {
arquivo de CharSignature[8];
uint32_t majorVersão;
uint32_t minorVersão;
arquivo uint64_tPhysicalLength;
uint64_t xmlFísicoOffset;
uint64_t xmlLogicalComprimento;
uint64_t tamanho da página;
}
O formato de dados E57 é suportado por scanners 3D estáticos e móveis, que são usados para calcular coordenadas de pontos.
Com dispositivos móveis, nuvens de pontos e dados de trajetória são vinculados usando carimbos de hora. Portanto, pelo menos uma varredura E57 deve conter um campo para marcações de data e hora. Informações de trajetória são necessárias para importar resultados de digitalização de dispositivos móveis. O arquivo de trajetória deve conter uma lista de posições do scanner associadas aos carimbos de data e hora. As posições devem ser especificadas no mesmo sistema de coordenadas que as coordenadas da nuvem de pontos, e os carimbos de tempo da trajetória devem corresponder aos carimbos de tempo dos pontos.
Exemplo de trajetória:
Tempo; X; Y; Z
189321.10; 15.96;-52.12; 133.68
189321.20; 15.21;-51.21; 134.01
189321.30; 14.75;-50.37; 134.35
189321.40; 14.10;-49.50; 134.31
189321.10; 13.78;-48.69; 134.43
…
Este é um arquivo de texto simples obtido dos scanners LIDAR. A primeira linha contém o número de linhas. Cada linha subsequente tem 7 valores, os três primeiros são as coordenadas (X, Y, Z) do ponto, o quarto é o valor de “intensity” e os três últimos são as estimativas de cores (R, G, B). Os valores R, G, B variam de 0 a 255 (um byte não assinado). O valor da intensidade é uma estimativa da fração de radiação incidente refletida pela superfície neste ponto. O formato PTS não permite armazenar valores negativos de intensidade pontual, portanto, uma opção adicional para selecionar o formato de intensidade original para recálculo subsequente em um padrão (0…65535) foi introduzida na caixa de diálogo de importação. Ao importar para um documento, o intervalo de intensidade será sempre 0…65535.
Exemplo:
253730194
0,41025 – 2,0806 8,00981 55 52 44 65
-0.63016 -1.84527 6.59447 228 228 230 225
0,4766 – 2,14446 7,91288 60 56 54 68
-0.52017 -1.51698 7.91458 60 58 50 71
0.626 – 2.46051 7.35187 152 140 160 161
0,62371 – 1,53502 7,46876 168 163 175 175
-0.62829 -2.27286 6.34905 208 204 213 212
0,62614 – 2,48739 7,36484 151 144 155 159
: : :
: : :
: : :
O formato é criado para otimizar os dados da nuvem de pontos, atualmente a versão mais recente é 0.7 (PCD_V7).
Cada arquivo PCD contém um cabeçalho que identifica e declara propriedades específicas dos dados da nuvem de pontos armazenados no arquivo. O cabeçalho PCD deve ser codificado ASCII. As entradas de cabeçalho devem ser listadas na ordem exata mostrada abaixo:
VERSÃO
CAMPOS
TAMANHO
TIPO
CONTAR
LARGURA
ALTURA
PONTO DE VISTA
PONTOS
DADOS
Formato de texto simples de coordenadas 3-dimensionais, separadas por espaços, contém pelo menos 3 colunas de dados (X, Y, Z).
Este é um formato de texto simples para as coordenadas de pontos 3-dimensionais, separados por espaços, contendo 7 campos por ponto. O problema é que, devido à falta de especificações para o conteúdo do arquivo de nuvem de pontos, o conteúdo dos campos pode variar dependendo de onde e por quem foi criado. O principal é que as primeiras 3 colunas sempre representam as coordenadas X, Y, Z, e o resto das colunas representam algum campo escalar associado a este ponto (R, G, B ou Nx, Ny, Nz, etc.).
O formato XYZ pode ser apresentado em tipos de texto e binários.
O formato binário do arquivo XYZ. Ele também pode conter dados de atributos, além das coordenadas dos pontos.
Um formato de armazenamento poligonal para objetos gráficos descritos como um conjunto de polígonos. O formato de arquivo tem duas representações – texto e binário. O formato PLY contém a descrição de vértices, faces e outros elementos, suas propriedades como cor, superfície normal, texturas, transparência e várias propriedades para as superfícies superior e inferior dos polígonos. A informação típica contém apenas dois elementos: as coordenadas (X, Y, Z) para os vértices de pontos e os índices de vértices para cada face.
O formato PLY suporta a criação de novas propriedades para objetos, mas se novas propriedades não forem compreendidas ou definidas em software de terceiros, elas podem ser ignoradas.
A estrutura de um arquivo PLY típico:
Cabeçalho
Lista Vertex
Lista Face
(listas de outros elementos)
NPC (nanoCAD Point Cloud Storage Format)
É o principal formato para armazenar e trocar dados de nuvem de pontos no nanoCAD ambiente.
O formato NPC é um contêiner otimizado indexado espacialmente para uma única nuvem de pontos com suporte para níveis de detalhes. O formato é capaz de armazenar não apenas a geometria da nuvem, mas também meta-informações: a intensidade do eco, o número de ecos, sinais da posição do sistema de varredura para os dados obtidos durante a varredura a laser, a cor do ponto, a classe do ponto, sua pertença a formas geométricas, o ID da fonte de dados e o tempo de seu registro, bem como informações calculadas: normal e curvatura em um ponto. A estrutura do contêiner permite que você trabalhe com ele projetando parcialmente os dados na memória.
Formato de armazenamento em nuvem de pontos do software Autodesk ReCap após importar arquivos de nuvem de pontos digitalizados para ele (formatos indexados no ReCap: ASC, CL3, CLR, E57, FLS, FWS, ISPROJ, LAS, PCG, PTG, PTS, PTX, RDS (somente 3D), TXT, XYB, XYZ, ZFS, ZFPRJ). Os dados de nuvem de pontos salvos no formato RCS estão em metros.
O formato de arquivo é um arquivo de projeto que agrupa vários arquivos de digitalização ao mesmo tempo. RCS, que na verdade contém links para arquivos RCS individuais e contém informações sobre eles e arquivos de visualização. O resultado da indexação de um arquivo de formato de origem é um .Arquivo RCP e um ou mais .Arquivos RCS. A estrutura interna do arquivo é xml