Nesta guia, você pode selecionar um conjunto de algoritmos que serão usados ao vetorizar uma imagem raster.
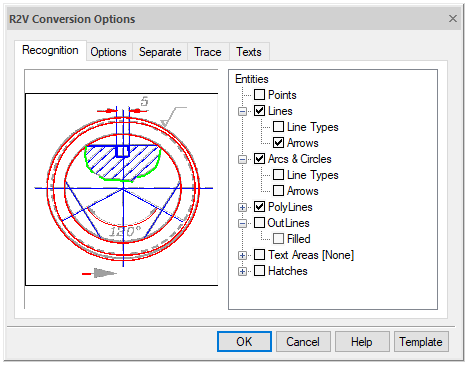
Guia de reconhecimento
Diferentes tipos de imagens rasterizadas devem ser vetorizadas usando diferentes conjuntos de entidades. Por exemplo, para vetorizar imagens de mapas ou esboços, você deve usar polilinhas que aproximem curvas raster de forma arbitrária e, ao vetorizar desenhos de engenharia – algoritmos que criam segmentos, círculos, arcos e, em seguida, o desenho vetorial reproduzirá com mais precisão o desenho original.
Para garantir a possibilidade de reconhecimento ótimo de imagens de diferentes estruturas, o Editor de Gráficos usa vários algoritmos de vetorização que reconhecem análogos raster de entidades vetoriais e geram objetos vetoriais aproximados dos tipos correspondentes. Você pode usar um ou mais algoritmos de reconhecimento em uma operação de vetorização.
A árvore de algoritmos está localizada na parte direita do Reconhecimento guia. No primeiro nível, existem algoritmos de reconhecimento. Para ativar o algoritmo desejado, marque a caixa ao lado de seu nome. O segundo nível da árvore contém funções e parâmetros adicionais dos algoritmos correspondentes.
O processo de vetorização também é diretamente influenciado pelos parâmetros de reconhecimento geométrico localizados no Opções guia desta caixa de diálogo.
Pontos
Esse algoritmo é usado para reconhecer marcas geodésicas e rótulos semelhantes em imagens específicas, por exemplo, em mapas geográficos.
O editor de gráficos reconhece como ponto um objeto com dimensões de pelo menos 2×2 pixels (objetos menores são considerados “speckle” e são excluídos) e não mais do que o Max. espessura vertical e horizontalmente.
O Ponto tipo de objeto só pode ser reconhecido em um modo automático.
Não é recomendado utilizar este algoritmo ao reconhecer imagens de baixa qualidade ou contendo muitos pequenos pontos e “speckle”.
Linhas
Inclui algoritmo de reconhecimento de segmento de linha. Como resultado do algoritmo wor, linhas retas são criadas.
A figura ilustra os resultados da vetorização usando um único habilitado Linhas algoritmo. O fragmento raster original é mostrado à esquerda; o desenho à direita mostra o resultado da vetorização com exibição desativada de espessuras de objetos.


Vectorização de linhas
Tem as seguintes opções adicionais:
é Setas – quando a opção está ativada, reconhece linhas retas de traço e traço-ponto, criando linhas vetoriais com o tipo de linha correspondente;
é Tipos de Linha quando a opção está ativada, ela reconhece análogos raster de linhas de dimensão (linhas com uma ou duas setas nos pontos finais) e, se as setas forem encontradas, as salva como marcadores finais da linha.
Este algoritmo é influenciado pelos seguintes parâmetros do Opções guia.
O algoritmo reconhece objetos raster, cujo comprimento é maior do que o valor do Min. comprimento opção, e a espessura é menos do que o valor do Max. espessura opção.
O Max. quebra conjuntos de opções o comprimento máximo de uma quebra de linha raster ignorada.
O Precisão de Aproximação opção define a precisão da aproximação de linhas rasterizadas por objetos vetoriais. Se a qualidade do raster for ruim, o valor da opção deve ser diminuído para que o algoritmo reconheça objetos rasterizados com distorções de forma significativas.
Quando o Ortogonalização o parâmetro é ativado, os segmentos de linha reconhecidos são alinhados paralelamente e perpendicular à direção especificada no Ângulo base campo. Seções com pequenos ângulos de desvio das direções correspondentes estão alinhadas. O desvio aceitável para a ortogonalização é determinado pelo Precisão parâmetro. Quanto mais próximo este parâmetro estiver do Baixo valor, quanto maior o desvio pode ser.
Arcos e círculos
Permite o algoritmo para reconhecer círculos raster e arcos.
A figura ilustra os resultados da vetorização usando o Linhas e Arcos e Círculos algoritmos. O fragmento raster original é mostrado à esquerda; o desenho à direita mostra o resultado da vetorização com exibição desativada de espessuras de objetos.

Vetorização de círculo
Tem as seguintes opções adicionais:
é Setas – quando a opção está ativada, o programa procura por análogos raster de arcos dimensionais (arcos com uma ou duas setas nos pontos finais) e, se as setas forem encontradas, cria os objetos dimensionais correspondentes;
é Tipos de Linha quando a opção está ativada, o programa reconhece arcos e círculos de traço e traço-ponto, criando objetos vetoriais com o tipo de linha apropriado.
Este algoritmo é influenciado pelos seguintes parâmetros do Opções guia.
O algoritmo reconhece círculos raster e arcos que são maiores do que o Min. comprimento, e a espessura é menos do que o valor de Max. espessura.
O Max. quebra a opção define o comprimento máximo de um arco raster ignorado e quebra de círculo.
O Precisão de Aproximação opção define a precisão da aproximação de arcos e círculos rasterizados por objetos vetoriais. Se a qualidade do raster for ruim, o valor da opção deve ser diminuído para que o algoritmo reconheça objetos rasterizados com distorções de forma significativas.
Polilinhas
Este algoritmo aproxima as linhas centrais de objetos rasterizados por polilinhas. O algoritmo cria polilinhas consistindo apenas em segmentos retos. Você pode usar este algoritmo sozinho ou em conjunto com o Esboços algoritmo ao vetorizar mapas e outras imagens que consistem em linhas arbitrárias (ou seja, linhas desenhadas à mão).
Tem as seguintes opções adicionais:
é Tipos de Linha – quando esta opção está ativada, o programa reconhece arcos e círculos de traço e traço-ponto, criando objetos vetoriais com o tipo de linha apropriado;
é Criar Vertex na Intersecção quando esta opção está ativada, o algoritmo cria vértices nas interseções de polilinhas.
Este algoritmo é influenciado pelos seguintes parâmetros do Opções guia.
Max. comprimento determina o comprimento máximo do segmento reconhecível adicionado à polilinha. Segmentos mais longos não são adicionados à polilinha. Isso permite, por exemplo, traçar contornos curvos em mapas que se cruzam com linhas de coordenadas; o algoritmo pára automaticamente na interseção do contorno traçado com uma linha de grade de coordenadas reta longa.
Aproxima as linhas raster que são mais finas do que o Max. espessura.
O Max. quebra conjuntos de opções o comprimento máximo de uma quebra de linha raster ignorada.
O Precisão de Aproximação conjuntos de opções a precisão da aproximação da curva rasterizada pela polilinha vetorial.
Esboços
Este algoritmo é projetado para aproximar os contornos de áreas preenchidas por polilinhas, criando polilinhas fechadas que aproximam os limites de objetos rasterizados. As polilinhas de contorno consistem apenas em segmentos retos.
A figura mostra os resultados da vetorização usando o único algoritmo Outlines habilitado. O fragmento raster original é mostrado à esquerda; à direita há o resultado da vetorização.


Esboços de vetorização
Este algoritmo é influenciado pelos seguintes parâmetros do Opções guia.
O algoritmo aproxima linhas raster que são mais grossas do que o Max. espessura. Para obter os contornos de todos os objetos raster, ative apenas esse algoritmo e defina o Max. espessura igual a zero.
O Max. Quebra a opção define o comprimento máximo de uma quebra de linha raster ignorada.
O Precisão de Aproximação conjuntos de opções a precisão de aproximar os limites do objeto raster por polilinhas vetoriais.
Áreas de texto
Permite o algoritmo de reconhecimento de texto. O programa encontra fragmentos de imagem contendo textos raster e aplica uma operação especificada como um parâmetro adicional do algoritmo para os textos encontrados.
As configurações de pesquisa para textos raster e o módulo OCR são configurados no Textos guia da mesma caixa de diálogo. A configuração é descrita abaixo neste capítulo.
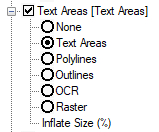
Opções de vetorização de áreas de texto
é Nenhum – não vetoriza textos rasterizados. As áreas que contêm textos rasterizados encontrados não são vetorizadas.
é Áreas de Texto – cria retângulos vetoriais que limitam textos rasterizados. As áreas que contêm textos rasterizados encontrados não são vetorizadas. Textos vetoriais podem ser inseridos manualmente usando o procedimento para visualizar e corrigir textos reconhecidos descritos mais adiante neste capítulo.
é Polilinhas – aproxima as linhas centrais de textos rasterizados com polilinhas.
é Esboços – aproxima os limites dos textos rasterizados com polilinhas de contorno.
é OCR – reconhece textos rasterizados e cria objetos de texto.
é Raster – reconhece textos rasterizados sem criar objetos de texto vetoriais.
O algoritmo usa os valores no Altura do Texto lista de Opções tab como a altura máxima dos caracteres de texto raster maiúsculos.
Informação: O NanoCAD é um aplicativo CAD fácil de usar, barato e ainda poderoso para computador pessoal, que permite uma excelente experiência do usuário, fornecendo alto desempenho, capacidade total, uma interface clássica e suporte nativo ao formato.dwg.o nanoCAD foi construído para fornecer documentação de projeto e projeto para todos os fins industriais.o nanoCAD inclui um conjunto completo de ferramentas CAD básicas e avançadas para 2D/Elaboração 3D e criação de arquivos CAD compatíveis com DWG padrão do setor. Nossa ferramenta fornece recursos criativos, colaborativos e personalizáveis para melhorar sua eficiência e inclui várias APIs, permitindo desde automação de tarefas rotineiras até desenvolvimento complexo de software CAD. Você pode baixar o nanoCad gratuitamente, usando os links abaixo, e comprar mais tarde, se quiser.